近日,由教育部学位与研究生教育发展中心、中国科协青少年科技中心主办的“申昊杯”第六届中国研究生机器人创新设计大赛全国总决赛在辽宁沈阳举行。我校研究生团队荣获三等奖2项。
我校高度重视中国研究生机器人创新设计大赛选拔推荐工作,成立专家指导评审小组,组织开展校内选拔赛,培养提升在校研究生在机器人设计、编程技术创新的兴趣和潜能,增强研究生创新实践能力,提升研究生教学与科研创新实践水平,以科学技术融汇于创新产品,助力广大研究生成长成才,以赛促学、以赛促教、以赛促创。
作为“中国研究生创新实践系列大赛”主题赛事之一,本届大赛以“绽放青春、载梦启航”为主题,赛事按照作品的成熟度和技术特点分成仿真组、部件组、集成组和“企业命题”专项组。参赛作品范围包括机器人的新概念、新技术、新产品,坚持面向世界科技前沿、面向经济主战场、面向国家重大需求、面向人民生命健康,不断向科学技术广度和深度进军。
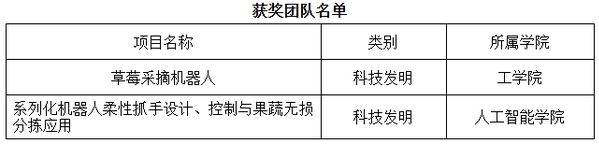
大赛共吸引来自186家研究生培养单位的1081支队伍6169名师生参赛。最终93家研究生培养单位的321支队伍进入全国总决赛。经过激烈角逐,来自我校工学院和人工智能学院的研究生团队斩获全国三等奖2项。

项目名称:草莓采摘机器人
推报单位:工学院
指导老师:汪小旵 施印炎
参赛队长:王得志
核心成员:林乐彬 黄慧星 胡绍炫 李宣
项目介绍:当前,草莓采收环节机收率低、用工矛盾突出,市场对高效采摘解决方案的需求愈发迫切。在此背景下,研发草莓采摘机器人及其采摘方法成为研究新焦点。基于深度学习的识别方法具有识别精度高、速度快和鲁棒性高的优势,在农业机器人领域不断取得新进展。但农业环境空间小、光线复杂、草莓果实娇嫩,对草莓识别、定位及导航带来挑战。本研究结合草莓特征提出了一种草莓识别网络,基于草莓的掩膜分割结果,计算果皮红色比例,精准判断草莓成熟度;基于关键点检测简化草莓复杂形状特征,定位采摘点。之后,基于视觉SLAM算法构建点云地图,并进行机器人定位与导航。设计了差速模型跟踪算法和控制系统,完成机器人的行走功能。本研究为草莓采摘机器人的研发提供了一种新方法新思路。

项目名称:系列化机器人柔性抓手设计、控制与果蔬无损分拣应用
推报单位:人工智能学院
指导老师:张保华
参赛队长:何圣贤
核心成员:闫静怡 杨媛媛
项目介绍:当前,人工果蔬分拣存在劳动量大、生产率低等问题,实现果蔬分拣的快速性和无损性成为亟需解决的任务。在此背景下,面向果蔬抓取的机器人抓手正成为研究的热点。其中,传统机械手抓取过程中易损害果蔬,且对于形状多样的果蔬,难以实现有效抓取。本研究结合生物-力学特性,创新性地采用具有良好柔韧度的柔性材料作为抓手的主要抓取部件,研发出专用于果蔬抓取的系列化机器人抓手,包括二指、三指、六指等不同型号,能实现对形状多样、易受损伤的果蔬农产品的无损抓取,具有充分的自适应性和顺应性。此外,搭建了视触融合多传感器感知网络,采用视觉传感器对果蔬进行识别定位及姿态估计,触觉传感器实时获取抓取过程中果蔬表面受力信息及手爪弯曲角度信息,并设计反馈控制系统对传感器获取到的信息进行实时反馈处理,实现抓取状态的调整和优化。